 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAstra: a generalizable report generation foundation model for 3D computed tomography
Jun 01, 2026CT interpretation requires radiologists to review hundreds of volumetric slices per examination, making reporting time-consuming and highly expertise-dependent. Automated CT report generation offers a promising route to improving clinical efficiency, yet the field still lacks a generalizable CT report generation foundation model that supports multi-region reporting and remains robust across external real-world cohorts. Intrinsic inconsistencies in reporting style and diagnostic terminology across cohorts make naive joint training prone to noisy textual supervision, thereby limiting model generalizability. Here we present Astra, a generalizable CT report generation foundation model trained on 90,678 thoracoabdominal CT-report pairs (CTRgDB) with 353,671 abnormalities spanning eight organ systems. By harmonizing report style and further refining diagnostic consistency via reinforcement learning, Astra achieves style-consistent and diagnostically accurate report generation across diverse anatomical regions and institutions. Evaluating on CTRgDB and six external cohorts, Astra achieves state-of-the-art performance with a 44.1% average improvement in fine-grained diagnostic metrics (P<0.001). In real-world clinical workflows, Astra assistance accelerates chest report drafting by 29.6% and improves abdominal report completeness by 11.3% (P<0.001). Furthermore, Astra also demonstrates broad utility as a foundation for CT AI development, improving downstream diagnostic performance and scaling vision-language pretrain through high-quality report synthesis. Overall, Astra serves as a broadly accessible clinical assistant and a pivotal infrastructure for the next generation of AI-powered healthcare.
A physics-informed foundation model for quantitative diffusion MRI
May 29, 2026Understanding the human brain requires access to its microscopic tissue architecture. Diffusion magnetic resonance imaging (MRI) provides the only noninvasive window into whole-brain microstructure in vivo, yet reliable quantitative mapping remains confined to specialized research settings requiring dense sampling and optimized acquisition protocols. To address this gap, we present a physics-informed generative microstructure network (PIGMENT) that learns a universal generative prior of human brain microstructure and adapts it zero-shot to each participant's measured data to recover subject-specific maps. Trained on 11375 scans spanning multiple sites, vendors, and field strengths, PIGMENT enabled reliable quantitative mapping for tensor, kurtosis, and NODDI models across external datasets from five independent centers. It remains effective where conventional fitting becomes unreliable, recovering meaningful maps from extremely sparse acquisitions while supporting downstream tractography and structural connectivity mapping. PIGMENT estimates demonstrated strong biological validity, preserving submillimeter cortical microarchitectural patterns and early-childhood white matter developmental trajectories from 10-fold accelerated scans. Furthermore, PIGMENT enables reliable quantitative tensor mapping on cost-efficient low-field systems and the extraction of tumor-related biomarkers using ultra-fast clinical protocols. Together, these results establish PIGMENT as a physics-informed foundation model that extends quantitative diffusion MRI into regimes traditionally too sparse, heterogeneous, or clinically constrained for reliable analysis.
ArthroCut: Autonomous Policy Learning for Robotic Bone Resection in Knee Arthroplasty
Mar 04, 2026Despite rapid commercialization of surgical robots, their autonomy and real-time decision-making remain limited in practice. To address this gap, we propose ArthroCut, an autonomous policy learning framework that upgrades knee arthroplasty robots from assistive execution to context-aware action generation. ArthroCut fine-tunes a Qwen--VL backbone on a self-built, time-synchronized multimodal dataset from 21 complete cases (23,205 RGB--D pairs), integrating preoperative CT/MR, intraoperative NDI tracking of bones and end effector, RGB--D surgical video, robot state, and textual intent. The method operates on two complementary token families -- Preoperative Imaging Tokens (PIT) to encode patient-specific anatomy and planned resection planes, and Time-Aligned Surgical Tokens (TAST) to fuse real-time visual, geometric, and kinematic evidence -- and emits an interpretable action grammar under grammar/safety-constrained decoding. In bench-top experiments on a knee prosthesis across seven trials, ArthroCut achieves an average success rate of 86% over the six standard resections, significantly outperforming strong baselines trained under the same protocol. Ablations show that TAST is the principal driver of reliability while PIT provides essential anatomical grounding, and their combination yields the most stable multi-plane execution. These results indicate that aligning preoperative geometry with time-aligned intraoperative perception and translating that alignment into tokenized, constrained actions is an effective path toward robust, interpretable autonomy in orthopedic robotic surgery.
Native Intelligence Emerges from Large-Scale Clinical Practice: A Retinal Foundation Model with Deployment Efficiency
Dec 16, 2025Current retinal foundation models remain constrained by curated research datasets that lack authentic clinical context, and require extensive task-specific optimization for each application, limiting their deployment efficiency in low-resource settings. Here, we show that these barriers can be overcome by building clinical native intelligence directly from real-world medical practice. Our key insight is that large-scale telemedicine programs, where expert centers provide remote consultations across distributed facilities, represent a natural reservoir for learning clinical image interpretation. We present ReVision, a retinal foundation model that learns from the natural alignment between 485,980 color fundus photographs and their corresponding diagnostic reports, accumulated through a decade-long telemedicine program spanning 162 medical institutions across China. Through extensive evaluation across 27 ophthalmic benchmarks, we demonstrate that ReVison enables deployment efficiency with minimal local resources. Without any task-specific training, ReVision achieves zero-shot disease detection with an average AUROC of 0.946 across 12 public benchmarks and 0.952 on 3 independent clinical cohorts. When minimal adaptation is feasible, ReVision matches extensively fine-tuned alternatives while requiring orders of magnitude fewer trainable parameters and labeled examples. The learned representations also transfer effectively to new clinical sites, imaging domains, imaging modalities, and systemic health prediction tasks. In a prospective reader study with 33 ophthalmologists, ReVision's zero-shot assistance improved diagnostic accuracy by 14.8% across all experience levels. These results demonstrate that clinical native intelligence can be directly extracted from clinical archives without any further annotation to build medical AI systems suited to various low-resource settings.
COME: Dual Structure-Semantic Learning with Collaborative MoE for Universal Lesion Detection Across Heterogeneous Ultrasound Datasets
Aug 13, 2025Conventional single-dataset training often fails with new data distributions, especially in ultrasound (US) image analysis due to limited data, acoustic shadows, and speckle noise. Therefore, constructing a universal framework for multi-heterogeneous US datasets is imperative. However, a key challenge arises: how to effectively mitigate inter-dataset interference while preserving dataset-specific discriminative features for robust downstream task? Previous approaches utilize either a single source-specific decoder or a domain adaptation strategy, but these methods experienced a decline in performance when applied to other domains. Considering this, we propose a Universal Collaborative Mixture of Heterogeneous Source-Specific Experts (COME). Specifically, COME establishes dual structure-semantic shared experts that create a universal representation space and then collaborate with source-specific experts to extract discriminative features through providing complementary features. This design enables robust generalization by leveraging cross-datasets experience distributions and providing universal US priors for small-batch or unseen data scenarios. Extensive experiments under three evaluation modes (single-dataset, intra-organ, and inter-organ integration datasets) demonstrate COME's superiority, achieving significant mean AP improvements over state-of-the-art methods. Our project is available at: https://universalcome.github.io/UniversalCOME/.
SurGSplat: Progressive Geometry-Constrained Gaussian Splatting for Surgical Scene Reconstruction
Jun 06, 2025Intraoperative navigation relies heavily on precise 3D reconstruction to ensure accuracy and safety during surgical procedures. However, endoscopic scenarios present unique challenges, including sparse features and inconsistent lighting, which render many existing Structure-from-Motion (SfM)-based methods inadequate and prone to reconstruction failure. To mitigate these constraints, we propose SurGSplat, a novel paradigm designed to progressively refine 3D Gaussian Splatting (3DGS) through the integration of geometric constraints. By enabling the detailed reconstruction of vascular structures and other critical features, SurGSplat provides surgeons with enhanced visual clarity, facilitating precise intraoperative decision-making. Experimental evaluations demonstrate that SurGSplat achieves superior performance in both novel view synthesis (NVS) and pose estimation accuracy, establishing it as a high-fidelity and efficient solution for surgical scene reconstruction. More information and results can be found on the page https://surgsplat.github.io/.
Hysteresis-Aware Neural Network Modeling and Whole-Body Reinforcement Learning Control of Soft Robots
Apr 18, 2025Soft robots exhibit inherent compliance and safety, which makes them particularly suitable for applications requiring direct physical interaction with humans, such as surgical procedures. However, their nonlinear and hysteretic behavior, resulting from the properties of soft materials, presents substantial challenges for accurate modeling and control. In this study, we present a soft robotic system designed for surgical applications and propose a hysteresis-aware whole-body neural network model that accurately captures and predicts the soft robot's whole-body motion, including its hysteretic behavior. Building upon the high-precision dynamic model, we construct a highly parallel simulation environment for soft robot control and apply an on-policy reinforcement learning algorithm to efficiently train whole-body motion control strategies. Based on the trained control policy, we developed a soft robotic system for surgical applications and validated it through phantom-based laser ablation experiments in a physical environment. The results demonstrate that the hysteresis-aware modeling reduces the Mean Squared Error (MSE) by 84.95 percent compared to traditional modeling methods. The deployed control algorithm achieved a trajectory tracking error ranging from 0.126 to 0.250 mm on the real soft robot, highlighting its precision in real-world conditions. The proposed method showed strong performance in phantom-based surgical experiments and demonstrates its potential for complex scenarios, including future real-world clinical applications.
LLM-RG4: Flexible and Factual Radiology Report Generation across Diverse Input Contexts
Dec 16, 2024Drafting radiology reports is a complex task requiring flexibility, where radiologists tail content to available information and particular clinical demands. However, most current radiology report generation (RRG) models are constrained to a fixed task paradigm, such as predicting the full ``finding'' section from a single image, inherently involving a mismatch between inputs and outputs. The trained models lack the flexibility for diverse inputs and could generate harmful, input-agnostic hallucinations. To bridge the gap between current RRG models and the clinical demands in practice, we first develop a data generation pipeline to create a new MIMIC-RG4 dataset, which considers four common radiology report drafting scenarios and has perfectly corresponded input and output. Secondly, we propose a novel large language model (LLM) based RRG framework, namely LLM-RG4, which utilizes LLM's flexible instruction-following capabilities and extensive general knowledge. We further develop an adaptive token fusion module that offers flexibility to handle diverse scenarios with different input combinations, while minimizing the additional computational burden associated with increased input volumes. Besides, we propose a token-level loss weighting strategy to direct the model's attention towards positive and uncertain descriptions. Experimental results demonstrate that LLM-RG4 achieves state-of-the-art performance in both clinical efficiency and natural language generation on the MIMIC-RG4 and MIMIC-CXR datasets. We quantitatively demonstrate that our model has minimal input-agnostic hallucinations, whereas current open-source models commonly suffer from this problem.
Anno-incomplete Multi-dataset Detection
Aug 29, 2024



Object detectors have shown outstanding performance on various public datasets. However, annotating a new dataset for a new task is usually unavoidable in real, since 1) a single existing dataset usually does not contain all object categories needed; 2) using multiple datasets usually suffers from annotation incompletion and heterogeneous features. We propose a novel problem as "Annotation-incomplete Multi-dataset Detection", and develop an end-to-end multi-task learning architecture which can accurately detect all the object categories with multiple partially annotated datasets. Specifically, we propose an attention feature extractor which helps to mine the relations among different datasets. Besides, a knowledge amalgamation training strategy is incorporated to accommodate heterogeneous features from different sources. Extensive experiments on different object detection datasets demonstrate the effectiveness of our methods and an improvement of 2.17%, 2.10% in mAP can be achieved on COCO and VOC respectively.
Rib Suppression in Digital Chest Tomosynthesis
Mar 05, 2022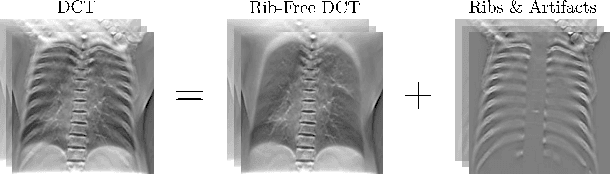
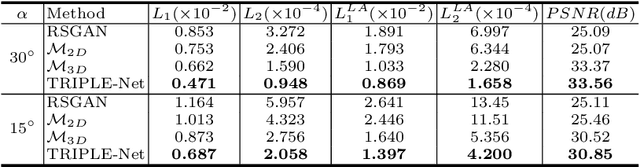
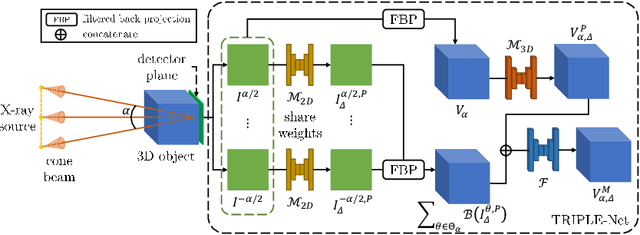
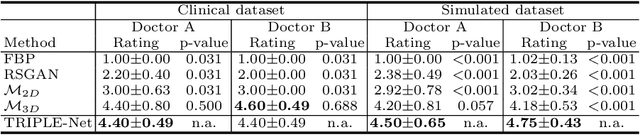
Digital chest tomosynthesis (DCT) is a technique to produce sectional 3D images of a human chest for pulmonary disease screening, with 2D X-ray projections taken within an extremely limited range of angles. However, under the limited angle scenario, DCT contains strong artifacts caused by the presence of ribs, jamming the imaging quality of the lung area. Recently, great progress has been achieved for rib suppression in a single X-ray image, to reveal a clearer lung texture. We firstly extend the rib suppression problem to the 3D case at the software level. We propose a $\textbf{T}$omosynthesis $\textbf{RI}$b Su$\textbf{P}$pression and $\textbf{L}$ung $\textbf{E}$nhancement $\textbf{Net}$work (TRIPLE-Net) to model the 3D rib component and provide a rib-free DCT. TRIPLE-Net takes the advantages from both 2D and 3D domains, which model the ribs in DCT with the exact FBP procedure and 3D depth information, respectively. The experiments on simulated datasets and clinical data have shown the effectiveness of TRIPLE-Net to preserve lung details as well as improve the imaging quality of pulmonary diseases. Finally, an expert user study confirms our findings.